IN THIS ARTICLE
PhysX Scene Queries
You can use physics raycast queries to determine whether a specific line segment intersects physics geometry. Similarly a shapecast query (also known as a sweep) tests whether a shape extruded along a line segment intersects with physics geometry. Example uses for these queries might include determining whether an object is in front of another object, or testing a line of sight. Overlap queries are a third type of scene query, which determine whether a stationary shape intersects with other physics geometry. All these scene queries are performed on an AzPhysics::SceneInterface object and they all test against the entire scene. Note that as well as queries against entire scenes, it is also possible to perform a raycast against a single
PhysX Simulated Body.
Each type of scene query can be performed using an AzPhysics::SceneQueryRequest object (there are specializations of the request object for each of the three scene query types). As well as performing a single query, it is possible to collect a batch of queries into a single call using an AzPhysics::SceneQueryRequests object, which is a container for many queries. It is also possible to call the request either synchronously or asynchronously.
virtual SceneQueryHits QueryScene(SceneHandle sceneHandle, const SceneQueryRequest* request) = 0;
virtual SceneQueryHitsList QuerySceneBatch(SceneHandle sceneHandle, const SceneQueryRequests& requests) = 0;
[[nodiscard]] virtual bool QuerySceneAsync(SceneHandle sceneHandle, SceneQuery::AsyncRequestId requestId,
const SceneQueryRequest* request, SceneQuery::AsyncCallback callback) = 0;
[[nodiscard]] virtual bool QuerySceneAsyncBatch(SceneHandle sceneHandle, SceneQuery::AsyncRequestId requestId,
const SceneQueryRequests& requests, SceneQuery::AsyncBatchCallback callback) = 0;
The results of scene queries are described using containers of AzPhysics::SceneQueryHit objects.
Note:Scene queries can have a performance cost.
Raycast
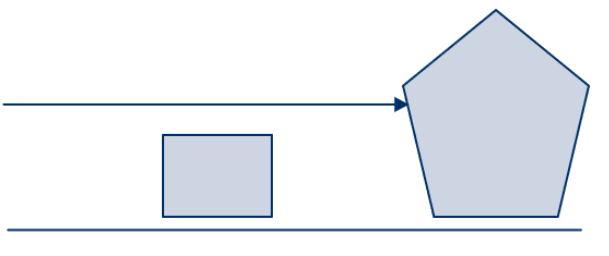
Raycast queries are the most common scene query, based on firing a ray from a start position a specified distance along a ray direction.
Example The raycast query intersects the pentagon only.
A raycast query is specified using an AzPhysics::RayCastRequest.
RayCastRequest Properties
| Property | Description |
|---|---|
m_distance | Maximum distance along the ray to test for intersections. |
m_start | World space point where the ray starts. |
m_direction | Direction to cast the ray. This vector must be normalized. |
m_hitFlags | Flags used to request particular hit fields to be returned, or indicate which hit fields are valid in a return value. |
m_filterCallback | Custom callback function provided by the game to filter out specific objects. |
m_reportMultipleHits | Whether to return all hits along the query (up to m_maxResults) or only return the first hit. |
m_maxResults | The maximum number of hits to return (limited by the Global Configuration). |
m_collisionGroup | Specifies which layers to test against. Use this to test only against specific layers. |
m_queryType | Include either static objects, dynamic objects, or both. |
To perform a raycast query, use the AzPhysics::SceneInterface.
Example (C++)
auto* sceneInterface = AZ::Interface<AzPhysics::SceneInterface>::Get();
AzPhysics::RayCastRequest request;
request.m_start = AZ::Vector3(-100.0f, 0.0f, 0.0f);
request.m_direction = AZ::Vector3(1.0f, 0.0f, 0.0f);
request.m_distance = 200.0f;
AzPhysics::SceneQueryHits result = sceneInterface->QueryScene(AzPhysics::DefaultPhysicsSceneName, &request);
auto numHits = result.size();
Example (Lua)
physicsSystem = GetPhysicsSystem()
sceneHandle = physicsSystem:GetSceneHandle(DefaultPhysicsSceneName)
scene = physicsSystem:GetScene(sceneHandle)
request = RayCastRequest()
request.Start = Vector3(5.0, 0.0, 5.0)
request.Direction = Vector3(0.0, 0.0, -1.0)
request.Distance = 10.0
request.ReportMultipleHits = true
hits = scene:QueryScene(request)
numHits = hits.HitArray:Size()
Script Canvas
The following nodes are available in Script Canvas:
- Raycast (Local Space) Returns the first entity hit by a ray cast in local space from the source entity in the specified direction.
- Raycast (World Space) Returns the first entity hit by a ray cast in world space from the start position in the specified direction.
- Raycast Multiple (Local Space) Returns all entities hit by a ray cast in local space from the source entity in the specified direction.
Shapecast
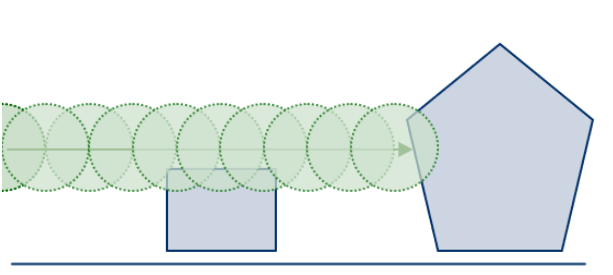
A shapecast query is similar to a raycast query except that a shapecast query takes a shape as well as a point and direction. The shape is swept along the ray to form a volume. Anything that intersects with this volume is returned from the query.
Example The shapecast query is in the shape of a sphere and intersects with the rectangle and pentagon entities.
A raycast query is specified using an AzPhysics::ShapeCastRequest.
ShapeCastRequest Properties
| Property | Description |
|---|---|
m_distance | Maximum distance along m_direction to test. |
m_start | Transform in world space where the shape cast begins. |
m_direction | Direction to cast. The vector must be normalised. |
m_hitFlags | Flags used to request particular hit fields to be returned, or indicate which hit fields are valid in a return value. |
m_shapeConfiguration | Shape that should be swept along the ray. |
m_filterCallback | Custom callback function provided by the game to filter out specific objects. |
m_reportMultipleHits | Whether to return all hits along the query (up to m_maxResults) or only return the first hit. |
m_maxResults | The maximum number of hits to return (limited by the Global Configuration). |
m_collisionGroup | Specifies which layers to test against. Use this property to test only against specific layers. |
m_queryType | Includes either static objects, dynamic objects, or both. |
Box, capsule and sphere geometries are supported, and there are helper functions to create queries with those shapes in AzPhysics::ShapeCastRequestHelpers. Convex mesh geometries are also supported in C++, but not currently exposed to scripting.
To perform a shapecast query, use the AzPhysics::SceneInterface.
Example (C++)
auto* sceneInterface = AZ::Interface<AzPhysics::SceneInterface>::Get();
AzPhysics::ShapeCastRequest request = AzPhysics::ShapeCastRequestHelpers::CreateSphereCastRequest(1.0f,
AZ::Transform::CreateTranslation(AZ::Vector3(-20.0f, 0.0f, 0.0f)),
AZ::Vector3(1.0f, 0.0f, 0.0f),
20.0f,
AzPhysics::SceneQuery::QueryType::StaticAndDynamic,
AzPhysics::CollisionGroup::All,
nullptr);
AzPhysics::SceneQueryHits hits = sceneInterface->QueryScene(AzPhysics::DefaultPhysicsSceneName, &request);
Example (Lua)
physicsSystem = GetPhysicsSystem()
sceneHandle = physicsSystem:GetSceneHandle(DefaultPhysicsSceneName)
scene = physicsSystem:GetScene(sceneHandle)
boxDimensions = Vector3(1.0, 1.0, 1.0)
startPose = Transform.CreateTranslation(Vector3(0.0, 0.0, 5.0))
direction = Vector3(0.0, 0.0, -1.0)
distance = 10.0
queryType = 0
collisionGroup = CollisionGroup("All")
request = CreateBoxCastRequest(boxDimensions, startPose, direction, distance, queryType, collisionGroup)
hits = scene:QueryScene(request)
Script Canvas
The following nodes are available in Script Canvas:
- Box Cast Returns the first entity hit by a shapecast query with box geometry.
- Capsule Cast Returns the first entity hit by a shapecast query with capsule geometry.
- Sphere Cast Returns the first entity hit by a shapecast query with sphere geometry.
Overlap
Overlap queries are simpler, as they don’t take a direction or distance. Overlap queries simply return all objects that intersect a shape at specified location in the world.
An overlap query is specified using an AzPhysics::OverlapRequest.
OverlapRequest Properties
| Property | Description |
|---|---|
m_pose | Transform in world space of the shape. |
m_shapeConfiguration | Shape to use for the overlap. |
m_filterCallback | Custom callback function provided by the same to filter out specific entities. |
m_unboundedOverlapHitCallback | Allows overlap queries to return unlimited results, processed via a callback. |
m_maxResults | The maximum number of hits to return (limited by the
Global Configuration, and assuming m_unboundedOverlapHitCallback is not used ). |
m_collisionGroup | Specifies which layers to test against. Use this property to test only against specific layers. |
m_queryType | Includes either static objects, dynamic objects, or both. |
Box, capsule and sphere geometries are supported, and there are helper functions to create queries with those shapes in AzPhysics::OverlapRequestHelpers. Convex mesh geometries are also supported in C++, but not currently exposed to scripting.
To perform an overlap query, use the AzPhysics::SceneInterface.
Example (C++)
auto* sceneInterface = AZ::Interface<AzPhysics::SceneInterface>::Get();
AzPhysics::OverlapRequest request = AzPhysics::OverlapRequestHelpers::CreateBoxOverlapRequest(AZ::Vector3(3.0f),
AZ::Transform::CreateTranslation(AZ::Vector3(13.0f, 0.0f, 0.0f)));
AzPhysics::SceneQueryHits results = sceneInterface->QueryScene(AzPhysics::DefaultPhysicsSceneName, &request);
Example (Lua)
physicsSystem = GetPhysicsSystem()
sceneHandle = physicsSystem:GetSceneHandle(DefaultPhysicsSceneName)
scene = physicsSystem:GetScene(sceneHandle)
boxDimensions = Vector3(1.0, 1.0, 1.0)
pose = Transform.CreateTranslation(Vector3(0.0, 0.0, 5.0))
request = CreateBoxOverlapRequest(boxDimensions, pose)
hits = scene:QueryScene(request)
Script Canvas
The following nodes are available in Script Canvas:
- Overlap Box Returns an array of Entity Ids which overlap with a box geometry.
- Overlap Capsule Returns an array of Entity Ids which overlap with a capsule geometry.
- Overlap Sphere Returns an array of Entity Ids which overlap with a sphere geometry.
SceneQueryHit
The results of scene queries are described using AzPhysics::SceneQueryHit objects. A single query may return multiple results, contained in an AzPhysics::SceneQueryHits object. The results of batch queries are described using an AzPhysics::SceneQueryHitsList object, which is a container of AzPhysics::SceneQueryHits objects.
SceneQueryHit Properties
| Property | Description |
|---|---|
m_resultFlags | Flags which indicate which of the below properties are valid. |
m_distance | The distance from the origin of the query to the hit (only valid for raycast and shapecast queries). |
m_bodyHandle | Handle to the AzPhysics::SimulatedBody which was hit. |
m_entityId | The Entity Id of the body which was hit. |
m_shape | The shape on the body which was hit. |
m_physicsMaterialId | The phsyics material id on the shape (or face) which was hit. |
m_position | The position of the hit in world space (only valid for raycast and shapecast queries). |
m_normal | The normal in world space of the hit surface. (only valid for raycast and shapecast queries). |